Các bộ điều khiển dùng trong tự động hóa
1/ Bộ điều khiển gián đoạn (on/off)
- Một trong những bộ điều khiển đơn giản nhất là điều khiển on/off. Ví dụ để điều khiển các thiết bị nhiệt trong gia đình chẳng hạn như nồi cơm điện, nó cần một cái rơ-le nhiệt để đóng và ngắt điện. Trong rơ-le nhiệt có một lò xo đàn hồi, khi nhiệt độ tăng lên lò xo sẽ bị giãn nở ra, dựa vào đặc tính trên người ta có thể tạo ra chức năng đóng ngắt dòng điện khi nhiệt độ tăng đến một mức mong muốn. Loại điều khiển này có thể thuộc một trong hai kiểu điều khiển vòng lặp mở và điều khiển vòng lặp kín.
- Điều khiển trình tự, trong đó một chuỗi lập trình của riêng rẽ các hoạt động được thực hiện, thường dựa trên logic hệ thống có liên quan đến trạng thái của hệ thống. Một hệ thống điều khiển thang máy là một ví dụ về điều khiển trình tự.
- Các loại tiên tiến của tự động hóa, cách mạng hóa sản xuất, máy bay, thông tin liên lạc và các ngành công nghiệp khác, là điều khiển phản hồi, mà thường liên tục và liên quan đến việc lấy số đo bằng cách sử dụng một cảm biến và điều chỉnh tính toán để giữ cho các biến đo lường trong phạm vi bộ.
2/ Bộ điều khiển PID
Bộ điều khiển vi tích phân tỉ lệ (bộ điều khiển PID- Proportional Integral Derivative) là một cơ chế phản hồi vòng điều khiển (bộ điều khiển) tổng quát được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp – bộ điều khiển PID là bộ điều khiển được sử dụng nhiều nhất trong các bộ điều khiển phản hồi. Bộ điều khiển PID sẽ tính toán giá trị "sai số" là hiệu số giữa giá trị đo thông số biến đổi và giá trị đặt mong muốn. Bộ điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều chỉnh giá trị điều khiển đầu vào. Trong trường hợp không có kiến thức cơ bản (mô hình toán học) về hệ thống điều khiển thì bộ điều khiển PID là sẽ bộ điều khiển tốt nhất. Tuy nhiên, để đạt được kết quả tốt nhất, các thông số PID sử dụng trong tính toán phải điều chỉnh theo tính chất của hệ thống-trong khi kiểu điều khiển là giống nhau, các thông số phải phụ thuộc vào đặc thù của hệ thống.
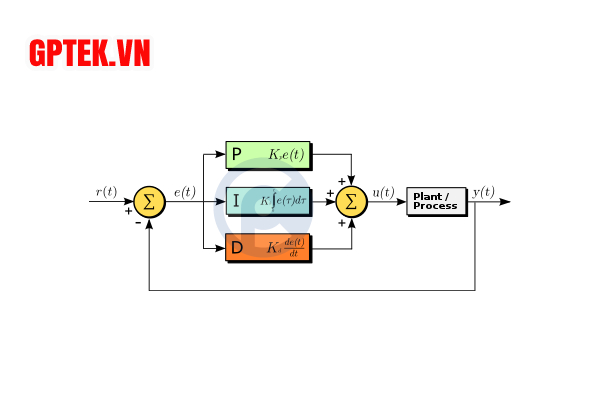 Một bộ điều khiển PID vòng lặp kín có dòng phản hồi, r(t) là tham số mong muốn hay còn gọi là "điểm thiết lập". còn y(t) giá trị của quá trình đầu ra
Một bộ điều khiển PID vòng lặp kín có dòng phản hồi, r(t) là tham số mong muốn hay còn gọi là "điểm thiết lập". còn y(t) giá trị của quá trình đầu ra
3/ Bộ điều khiển tuần tự và điều khiển tuần tự logic
- Điều khiển tuần tự có thể là một chuỗi cố định hay một logic rằng sẽ thực hiện các hành động khác nhau tùy thuộc vào trạng thái hệ thống khác nhau. Một ví dụ về một chuỗi điều chỉnh nhưng nếu không cố định là một bộ đếm thời gian trên một máy tưới cỏ.
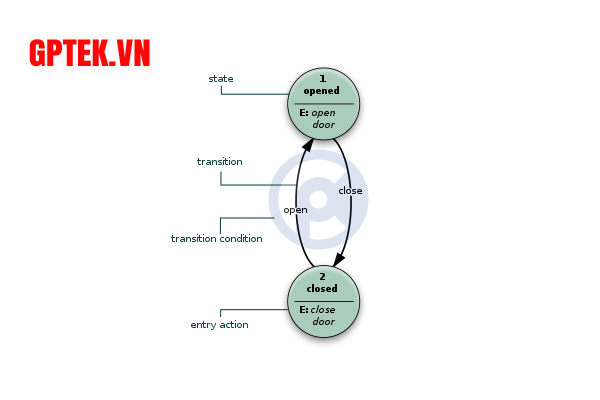
- Hoa tham khảo các điều kiện khác nhau mà có thể xảy ra trong một trình tự sử dụng hoặc kịch bản của hệ thống. Một ví dụ là một thang máy, trong đó sử dụng logic dựa trên các hệ thống nhà nước để thực hiện một số hành động để đáp ứng với trạng thái và hành đầu vào của nó. Ví dụ, nếu các nhà điều hành nhấn nút n tầng, hệ thống sẽ đáp ứng tùy thuộc vào việc các thang máy dừng lại hay di chuyển, đi lên hoặc xuống, hoặc nếu cửa đang mở hoặc đóng cửa, và các điều kiện khác.
- Một sự phát triển sớm của điều khiển liên tục là lý chuyển tiếp, do đó rơle điện tham gia tiếp xúc điện có thể bắt đầu hoặc ngắt điện đến một thiết bị. Rơle đầu tiên được sử dụng trong các mạng điện báo trước khi được phát triển để kiểm soát các thiết bị khác, chẳng hạn như khi khởi động và dừng động cơ điện công nghiệp lớn hoặc đóng mở van solenoid. Sử dụng rơ le cho mục đích kiểm soát cho phép kiểm soát hướng sự kiện, nơi các hành động có thể được kích hoạt theo trật tự nào, để đáp ứng với các sự kiện bên ngoài. Đây là linh hoạt hơn trong phản ứng của họ hơn so với đơn tự cam giờ cứng nhắc. Ví dụ phức tạp liên quan đến việc duy trì chuỗi an toàn cho các thiết bị như điều khiển cầu swing, nơi một tia khóa cần thiết để được thảnh thơi trước khi cầu có thể được di chuyển, và các tia khóa có thể không được phát hành cho đến khi cửa an toàn đã bị đóng cửa.
- Tổng số rơ le, giờ cam và trình tự trống có thể đánh số vào hàng trăm hoặc thậm chí hàng ngàn trong số các nhà máy. Đầu lập trình kỹ thuật và ngôn ngữ là cần thiết để làm cho hệ thống như vậy có thể quản lý, một trong những việc đầu tiên là lý bậc thang, nơi sơ đồ của các rơle nối liền với nhau giống như những nấc thang. Máy tính đặc biệt gọi là bộ điều khiển logic lập trình sau đó đã được thiết kế để thay thế các bộ sưu tập của phần cứng với một duy nhất, đơn vị dễ dàng hơn tái lập trình.
- Trong một động cơ có dây thông thường khó khởi động và dừng mạch (gọi là một mạch điều khiển) một động cơ được bắt đầu bằng cách đẩy một nút "Start" hoặc "Run" để kích hoạt một cặp của các rơle điện. Các "lock-in" khóa chuyển tiếp trong danh bạ mà giữ cho mạch điều khiển năng lượng khi các nút nhấn được phát hành. (Các nút bắt đầu là một số liên lạc thường mở và nút dừng là bình thường liên lạc kín.) Một sinh lực tiếp sức một switch mà quyền hạn của thiết bị mà ném chuyển đổi động cơ khởi động (ba bộ liên lạc cho công nghiệp điện ba pha) trong mạch điện chính. (Lưu ý:. Động cơ lớn sử dụng điện áp cao và kinh nghiệm cao trong cao điểm hiện tại, làm cho tốc độ quan trọng trong việc đưa ra và phá vỡ liên hệ này có thể nguy hiểm cho nhân viên và tài sản với công tắc tay.) Tất cả các địa chỉ liên lạc được tổ chức tham gia của nam châm điện của mình cho đến khi một " dừng lại "hay" nút tắt "được nhấn, mà de-sinh lực các khóa trong relay. Xem sơ đồ: Motor Starters Hand-Off-Auto With Start-Stop (Lưu ý: Các mô tả ở trên là "Auto" vị trí trong sơ đồ trường hợp này).
- Thường khoá liên động được thêm vào một mạch điều khiển. Giả sử rằng các động cơ trong ví dụ này là cung cấp năng lượng, máy móc mà có một nhu cầu quan trọng để bôi trơn. Trong trường hợp này một khóa liên động có thể được thêm vào để đảm bảo rằng các máy bơm dầu đang chạy trước khi động cơ bắt đầu. Timers, công tắc giới hạn và mắt điện là những yếu tố phổ biến khác trong mạch điều khiển.
- Van điện từ được sử dụng rộng rãi trên khí nén hoặc chất lỏng thủy lực để cấp nguồn cho thiết bị truyền động vào các thành phần cơ khí. Trong khi động cơ được sử dụng để cung cấp chuyển động quay liên tục, cơ cấu truyền động thường là một lựa chọn tốt hơn cho không liên tục tạo ra một phạm vi giới hạn của chuyển động cho một thành phần cơ khí, chẳng hạn như di chuyển cánh tay cơ khí khác nhau, mở hoặc đóng các van, nâng cuộn báo chí nặng, áp dụng áp lực để ép.
- Qúy khách có thể mua thiết bị tự động hóa chính hãng tại đây: https://gptek.vn/
4/ Bộ điều khiển dùng máy tính
Máy tính có thể thực hiện cả hai điều khiển liên tục và kiểm soát thông tin phản hồi, và thường là một máy tính duy nhất sẽ làm cả hai trong một ứng dụng công nghiệp. bộ điều khiển logic khả trình (PLC) là một loại vi xử lý mục đích đặc biệt thay thế nhiều các thành phần phần cứng như giờ và trình tự trống được sử dụng trong tiếp sức lý hệ thống loại. Máy tính điều khiển quá trình nhằm mục đích chung đã ngày càng thay thế đứng một mình điều khiển, với một máy tính duy nhất có thể thực hiện các hoạt động của hàng trăm bộ điều khiển. Máy tính điều khiển quá trình có thể xử lý dữ liệu từ một mạng lưới các PLC, dụng cụ và các bộ điều khiển để thực hiện các điển hình (như PID) kiểm soát của nhiều biến số cá nhân hoặc trong một số trường hợp, để thực hiện điều khiển phức tạp thuật toán sử dụng nhiều đầu vào và các thao tác toán học. Họ cũng có thể phân tích dữ liệu và tạo ra thời gian thực hiển thị đồ họa cho các nhà khai thác và chạy các báo cáo cho các nhà khai thác, các kỹ sư và quản lý.
Kiểm soát của một máy rút tiền tự động (ATM) là một ví dụ về một quá trình tương tác, trong đó một máy tính sẽ thực hiện một logic bắt nguồn đáp ứng với một lựa chọn người sử dụng dựa trên thông tin lấy từ một cơ sở dữ liệu trên mạng. Quá trình ATM có điểm tương đồng với các quy trình giao dịch trực tuyến khác. Các câu trả lời hợp lý khác nhau được gọi là kịch bản. Quá trình như vậy thường được thiết kế với sự trợ giúp của các trường hợp sử dụng và sơ đồ, trong đó hướng dẫn các văn bản của các mã phần mềm.
Công Ty TNHH TM Và DV Công Nghệ Mới GP
Địa chỉ: 390/9 đường HT13, Phường Hiệp Thành, Quận 12, Thành phố Hồ Chí Minh
Email: info@gptek.vn
Điện thoai: 0865301239 (call/zalo)
Website: https://gptek.vn/







